
|
|
last update 20 Sep 2009 |
|
#include <cvrChannelC.h>

Public Member Functions | |
| channelC () | |
| channelC (const int rows, const int cols) | |
| channelC (const ipoint &size) | |
| channelC (const int rows, const int cols, const fcomplex &iniValue) | |
| channelC (const ipoint &size, const fcomplex &iniValue) | |
| channelC (const int rows, const int cols, const fcomplex data[]) | |
| channelC (const channelC &other, const int fromRow, const int fromCol=0, const int toRow=MaxIndex, const int toCol=MaxIndex) | |
| channelC (const channelC &other) | |
| channelC (const channelC &other, const ipoint &from, const ipoint &to) | |
| virtual const std::string & | name () const |
| virtual channelC * | clone () const |
| virtual channelC * | newInstance () const |
| channelC & | castFrom (const channel8 &other) |
| channelC & | castFrom (const image &other) |
| template<typename U > | |
| channelC & | castFrom (const matrix< U > &other) |
| void | getReal (channel &real) const |
| void | getImag (channel &imag) const |
| void | getNorm (channel &smag) const |
| void | getAbs (channel &mag) const |
| void | getArg (channel &arg) const |
| void | getArgFast (channel &arg) const |
| bool | set (const channel &real, const channel &imag) |
| void | get (channel &real, channel &imag) const |
| channelC & | mapLinear (const fcomplex &minVal, const fcomplex &maxVal, const fcomplex &minDest=0.0f, const fcomplex &maxDest=1.0f) |
| template<typename U > | |
| channelC & | mapLinear (const matrix< U > &other, const U &minVal, const U &maxVal, const fcomplex &minDest=0.0f, const fcomplex &maxDest=1.0f) |
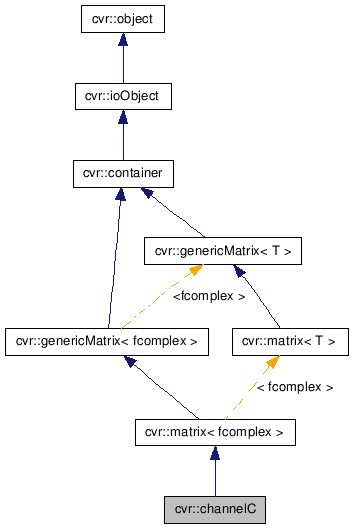
This class is identical to a matrix of cvr::fcomplex except for the method castFrom(channel8).
The typical value range is between 0.0f and 1.0f for both, real and imaginary components (see cvr::image for more information).
| cvr::channelC::channelC | ( | ) |
Default constructor creates an empty channel.
| cvr::channelC::channelC | ( | const int | rows, | |
| const int | cols | |||
| ) |
| cvr::channelC::channelC | ( | const ipoint & | size | ) |
Create a connected size.y x size.x channel and initializes all elements with iniValue.
| size | cvr::ipoint with the size of the channel (size.x is the number of columns and size.y the number of rows) |
| cvr::channelC::channelC | ( | const int | rows, | |
| const int | cols, | |||
| const fcomplex & | iniValue | |||
| ) |
Create a connected size.y x size.x channel and initializes all elements with iniValue.
| size | cvr::ipoint with the size of the channel (size.x is the number of columns and size.y the number of rows) | |
| iniValue | all elements will be initialized with this value |
| cvr::channelC::channelC | ( | const int | rows, | |
| const int | cols, | |||
| const fcomplex | data[] | |||
| ) |
Create a connected rows x cols channel and initializes all elements with the data ipointed by data.
The first cols-elements of the data will be copied on the first row, the next ones on the second row and so on.
| cvr::channelC::channelC | ( | const channelC & | other, | |
| const int | fromRow, | |||
| const int | fromCol = 0, |
|||
| const int | toRow = MaxIndex, |
|||
| const int | toCol = MaxIndex | |||
| ) |
Copy constructor.
Create a window from another channelC.
| other | the channel to be copied. | |
| fromRow | initial row of the other channel to be copied | |
| fromCol | initial column of the other channel to be copied | |
| toRow | last row to be copied of the other channel | |
| toCol | last column to be copied of the other channel |
cvr::channelC m(4,6,0); // channel with 24 elements // ... // initialize channel with: // 0 1 2 3 4 5 // 2 1 5 4 0 3 // 1 2 1 2 3 2 // 3 3 2 1 2 3 cvr::channelC sm(m,1,3,0,2) // this line will lead to the // following contents for sm: // 1 2 3 // 1 5 4 // 2 1 2
| cvr::channelC::channelC | ( | const channelC & | other | ) |
Copy constructor.
Copy the other matrix by casting each of its elements.
| other | The matrix to be casted |
References castFrom().
Cast the image to an channelC.
It extracts the intensity channel of the image, defined as (R+G+B)/3, where R, G, and B are the red, green and blue components of the pixel.
The elements of the resulting channel will be between 0.0f (black) and 1.0f (white) for the real part and zero as imaginary part.
| other | the image to be casted |
Copy the other channel8 by casting each of its elements.
The elements of the channel8 will be also multiplied by 1/255.
| other | the channel8 to be casted |
cvr::channel8 matA(10,10,255); // a channel8 cvr::channel matB; // a channel matB.castFrom(matA); // this will copy matA in matB!! // and all elements will have 1.0f
Referenced by castFrom().
| virtual channelC* cvr::channelC::clone | ( | ) | const [virtual] |
Create a clone of this channel.
Reimplemented from cvr::matrix< fcomplex >.
Get the real and imaginary parts as two different channels.
| void cvr::channelC::getAbs | ( | channel & | mag | ) | const |
Extract the magnitude of each pixel.
This method is slower than getSqrMagnitude() as it has to apply the square root to each pixel.
| void cvr::channelC::getArg | ( | channel & | arg | ) | const |
Extract the argument of each pixel (its angle).
This method is slow as it needs to apply the arctan to each pixel.
For time critical applications, use the getArgumentFast, which makes use of the cvr::arctanLUT, but is not as precise as this one.
| void cvr::channelC::getArgFast | ( | channel & | arg | ) | const |
Extract the argument of each pixel (its angle) in a fast way.
This method requires that both the real and imaginary parts lie within the interval [0,1].
This method makes use of the cvr::arctanLUT to accelerate the computation of the angle. If you need very precise angular values, use the getArg() method instead.
| void cvr::channelC::getImag | ( | channel & | imag | ) | const |
Extract the imaginary part of each pixel as a channel.
| void cvr::channelC::getNorm | ( | channel & | smag | ) | const |
Extract the squared magnitude of each pixel.
This method is faster than getAbs() as it avoids taking the square root of each pixel.
| void cvr::channelC::getReal | ( | channel & | real | ) | const |
Extract the real part of each pixel as a channel.
| channelC & cvr::channelC::mapLinear | ( | const matrix< U > & | other, | |
| const U & | minVal, | |||
| const U & | maxVal, | |||
| const fcomplex & | minDest = 0.0f, |
|||
| const fcomplex & | maxDest = 1.0f | |||
| ) | [inline] |
Apply a gray valued transformation which maps the given intervall of the other channel into [0.0,1.0] (default) or the explicitly given "destination" interval in this channel.
| other | the other channel which values are to be mapped into the new interval | |
| minVal | the lower limit of the original data interval | |
| maxVal | the higher limit of the original data interval | |
| minDest | the lower limit of the mapped interval (default 0.0f) | |
| maxDest | the higher limit of the mapped interval (default 1.0f) |
cvr::channel chnl; // ... chnl.mapLinear(-1.0f,2.0f,0.0,1.0); // map [-1,2] to [0,1] // this is equivalent to (due to default "destination" interval) chnl.mapLinear(-1.0f,2.0f);
Not that you can use this method to "invert" your gray values with
chnl.mapLinear(0.0f,1.0f,1,0f,0.0f); // map [0,1] to [1,0] // this is equivalent to (due to default "destination" interval) chnl.mapLinear(1.0f,0.0f);
References cvr::genericMatrix< fcomplex >::allocate(), cvr::genericVector< T >::begin(), cvr::genericMatrix< fcomplex >::begin(), cvr::genericVector< T >::end(), cvr::matrix< T >::getRow(), cvr::genericMatrix< T >::rows(), and cvr::genericMatrix< T >::size().
| channelC& cvr::channelC::mapLinear | ( | const fcomplex & | minVal, | |
| const fcomplex & | maxVal, | |||
| const fcomplex & | minDest = 0.0f, |
|||
| const fcomplex & | maxDest = 1.0f | |||
| ) |
Apply a gray valued transformation which maps the given interval to [0.0,1.0] (default) or the explicitly given "destination" interval.
| minVal | the lower limit of the original data interval | |
| maxVal | the higher limit of the original data interval | |
| minDest | the lower limit of the mapped interval (default 0.0f) | |
| maxDest | the higher limit of the mapped interval (default 1.0f) |
For example, if you want to map the interval [-1.0f,2.0f] to the "usual" interval [0.0,1.0] just use one of following methods:
cvr::channel chnl; // ... chnl.mapLinear(-1.0f,2.0f,0.0,1.0); // map [-1,2] to [0,1] // this is equivalent to (due to default "destination" interval) chnl.mapLinear(-1.0f,2.0f);
Not that you can use this method to "invert" your gray values with
| virtual const std::string& cvr::channelC::name | ( | ) | const [virtual] |
| virtual channelC* cvr::channelC::newInstance | ( | ) | const [virtual] |
Create a new empty channel.
Reimplemented from cvr::matrix< fcomplex >.
Set the real and imaginary parts from two different channels.
Both channels must have the same size. If they are not, the method returns false.